Project Description
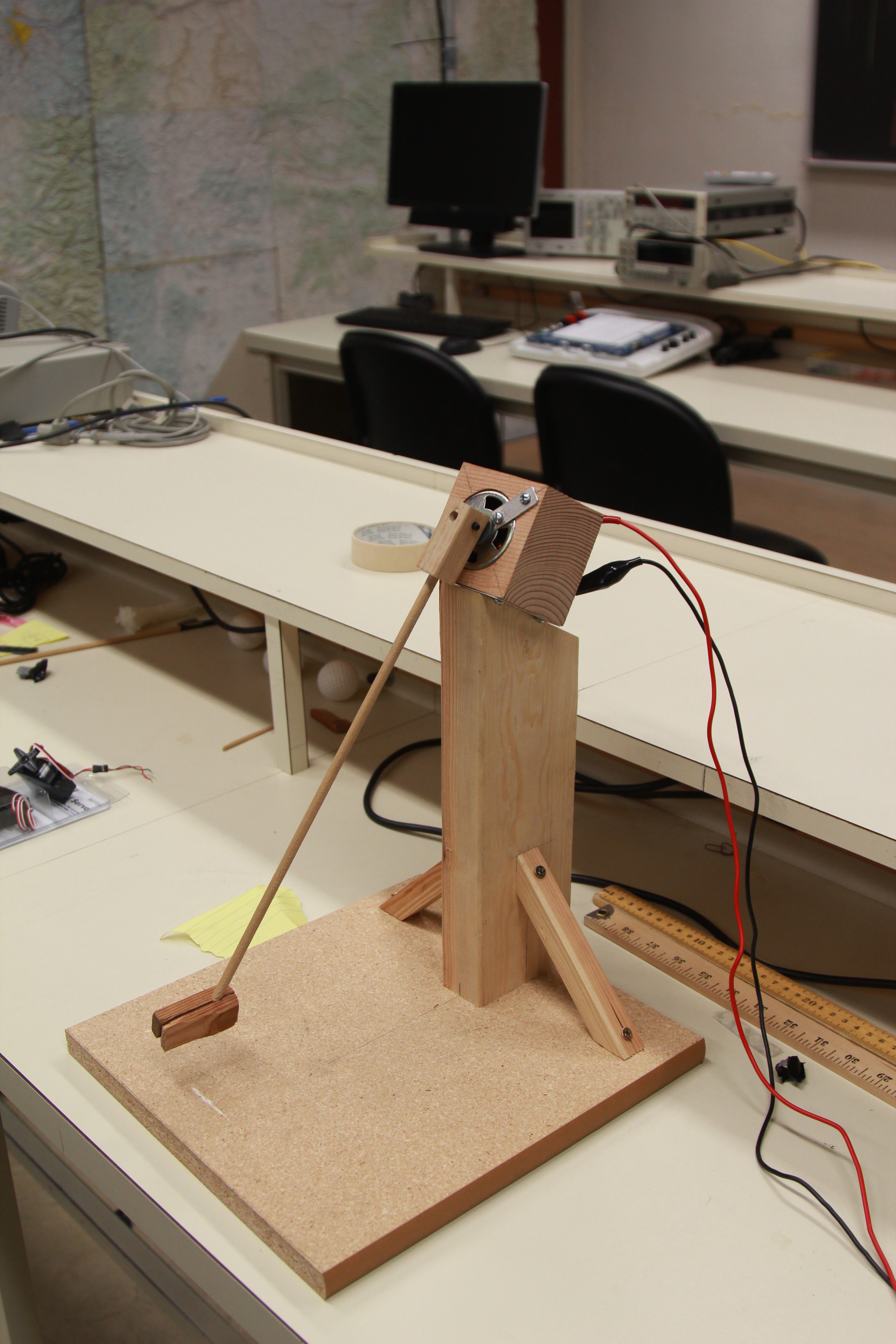
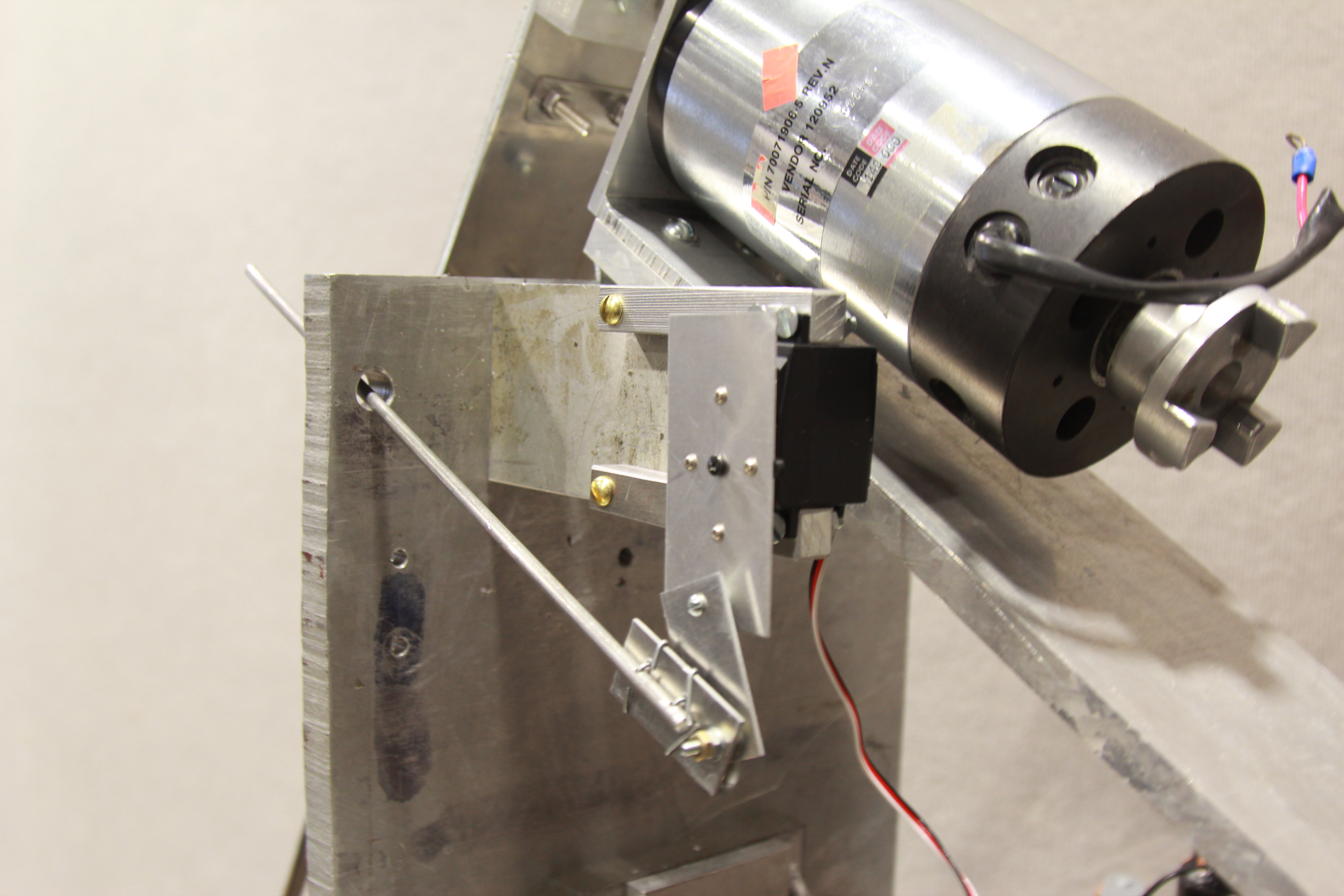
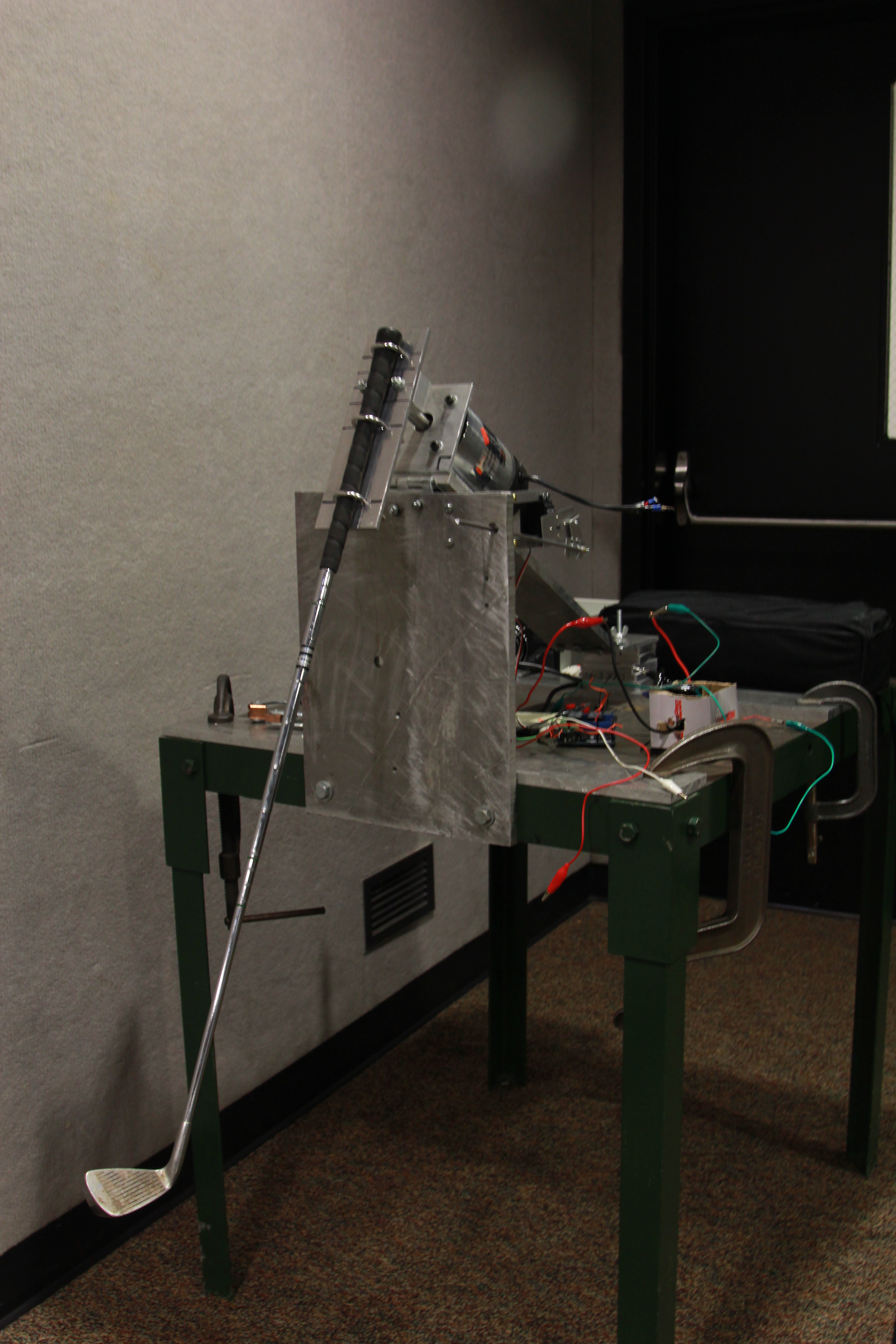
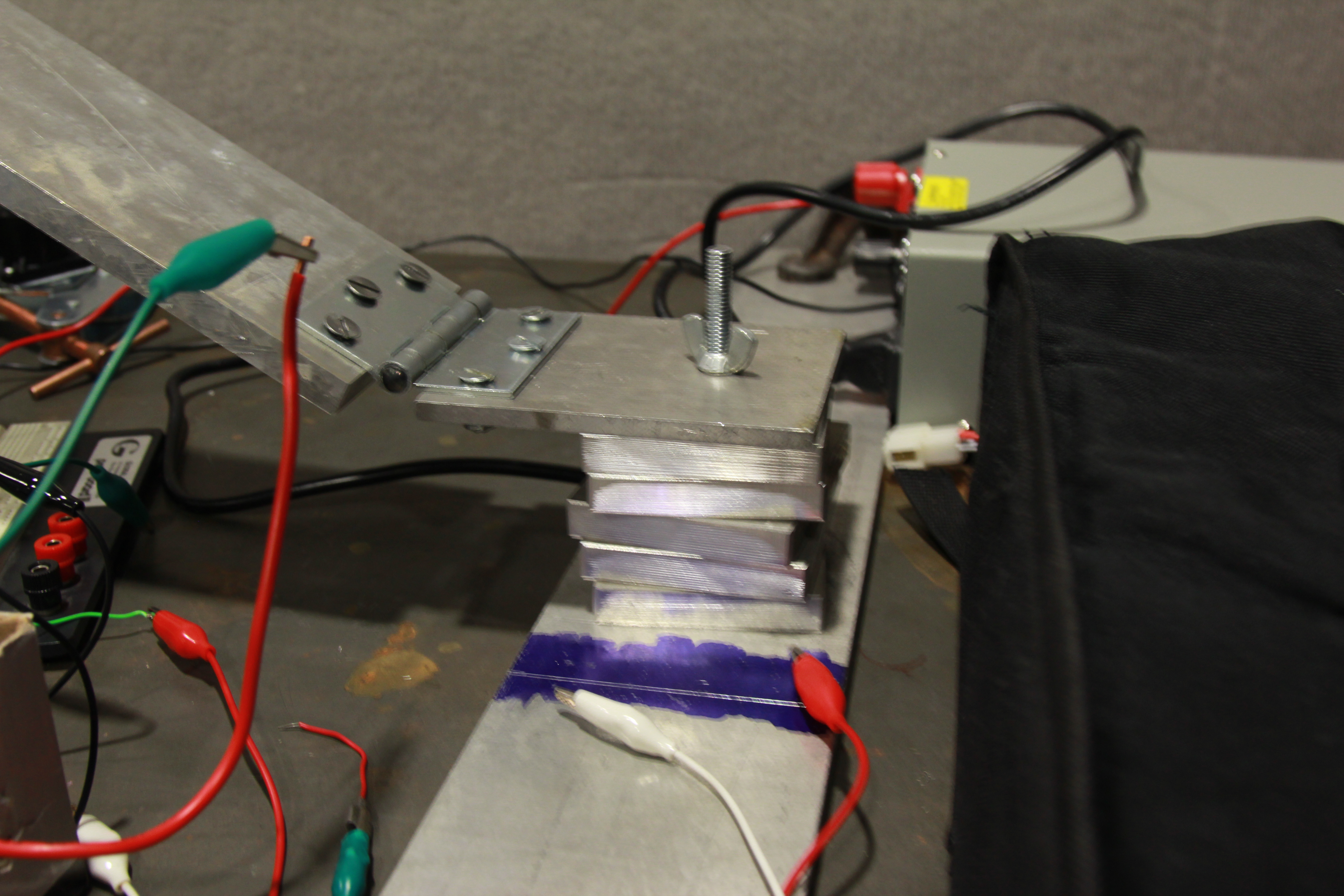
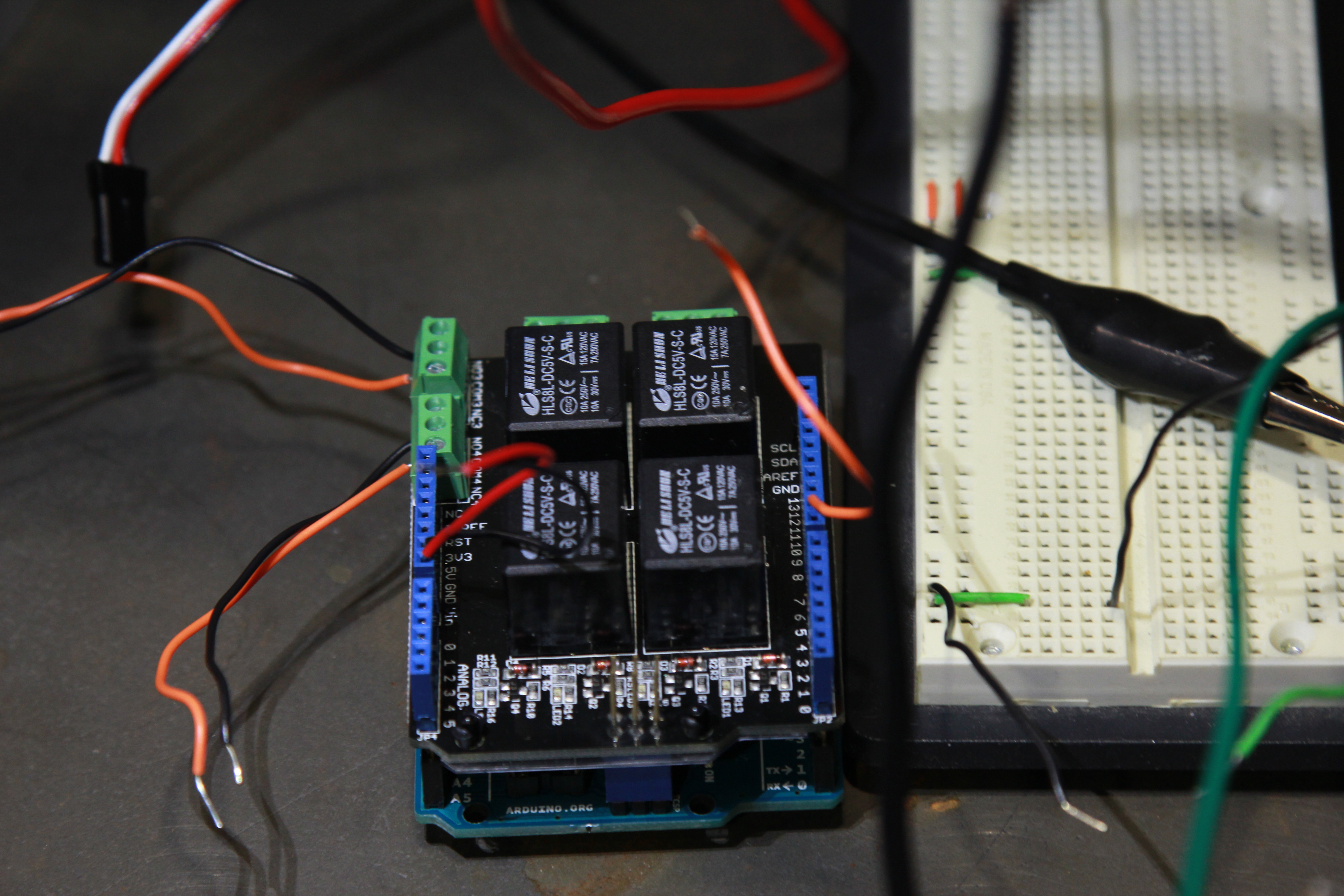
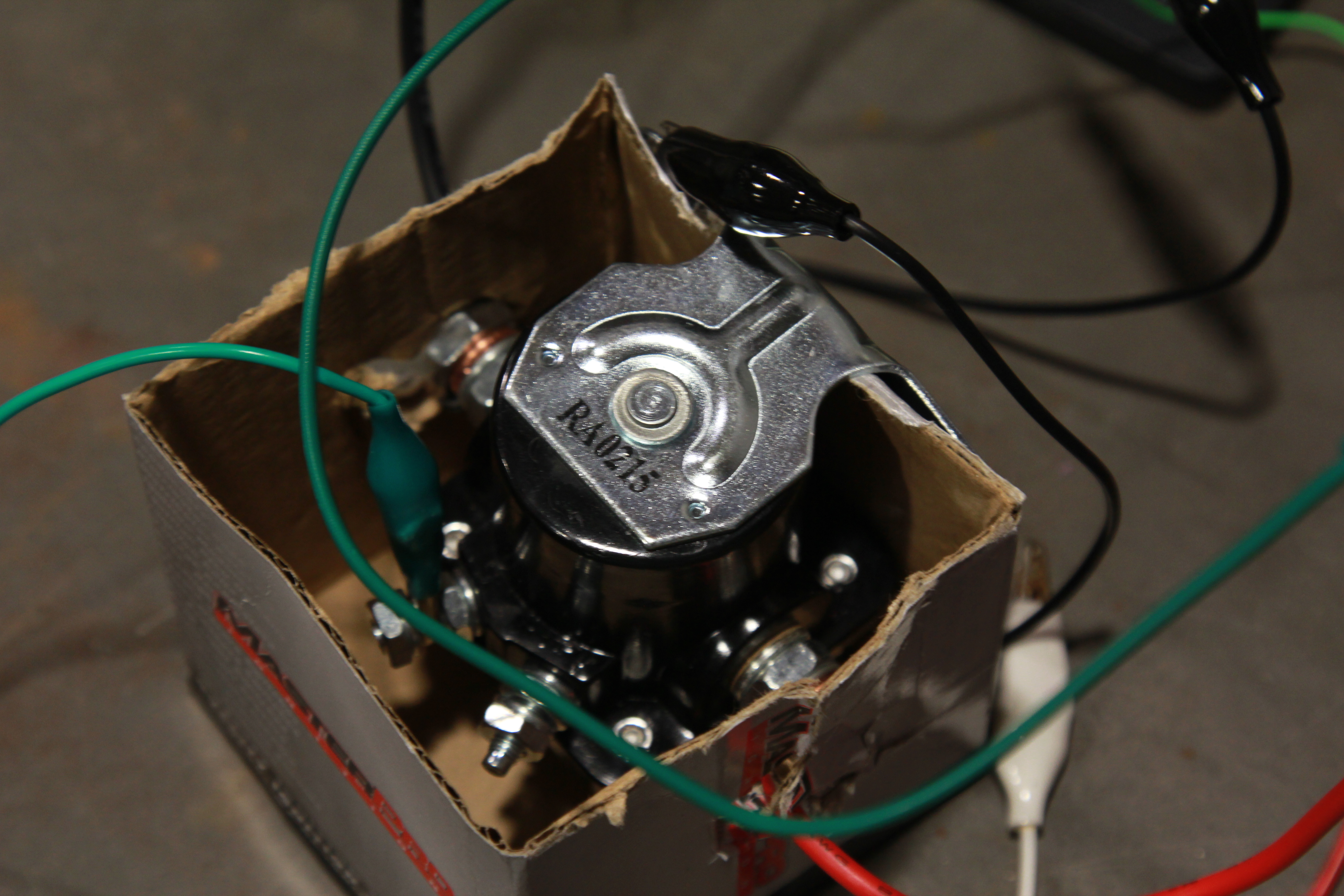
We built a single jointed golf club swinging robot capable of swinging all club types with notable accuracy. This accuracy was a result of having a sturdy frame, fixed golf club holder, jointed tee and an all automated setup using an Arduino micro-controller. Our micro-controller powered a series of relays that enabled us to have high voltage and current power our motor. Having a robot with a reproducible swing allowed us to perform repeated tests inside and outside where we measured accuracy, flight dynamics, club swing metrics, and the energy transfer from club to ball. We were also able to compare our ball trajectory and club speed to that of a professional golfer’s swing, trajectory and speed. This project has applications in the field of golf club and ball testing as well as creating a solid starting point to replace the current motor with a more powerful brushless servo to create a 2 jointed swing system that can be used to analyze swing mechanics.