Project Description
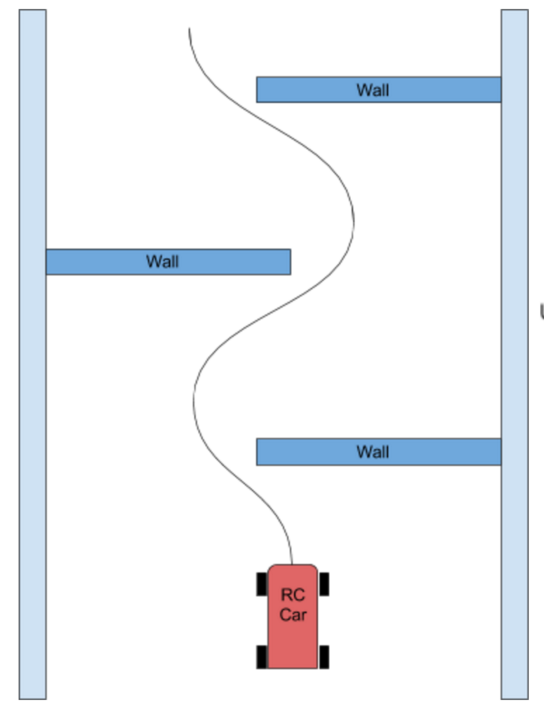
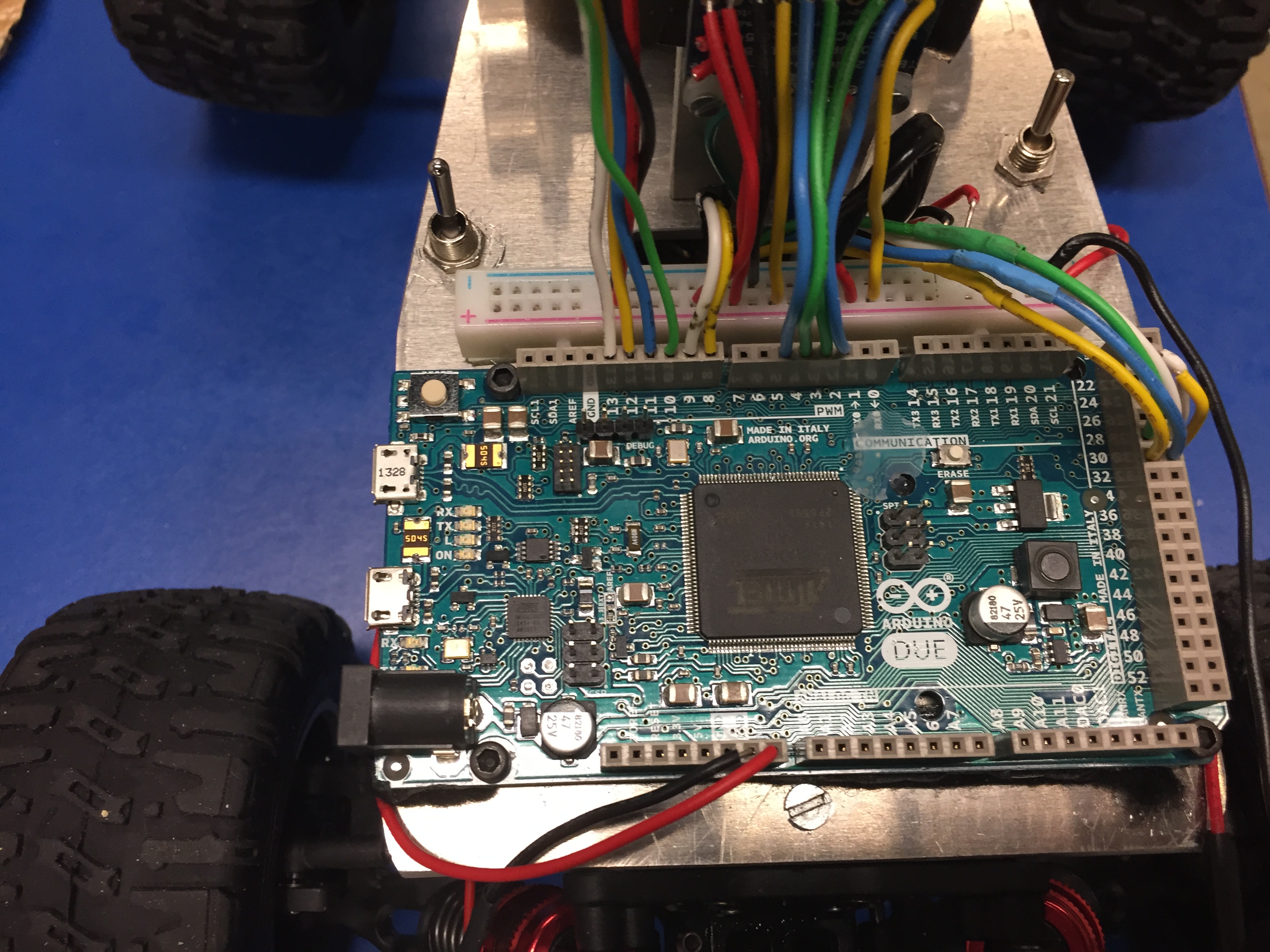

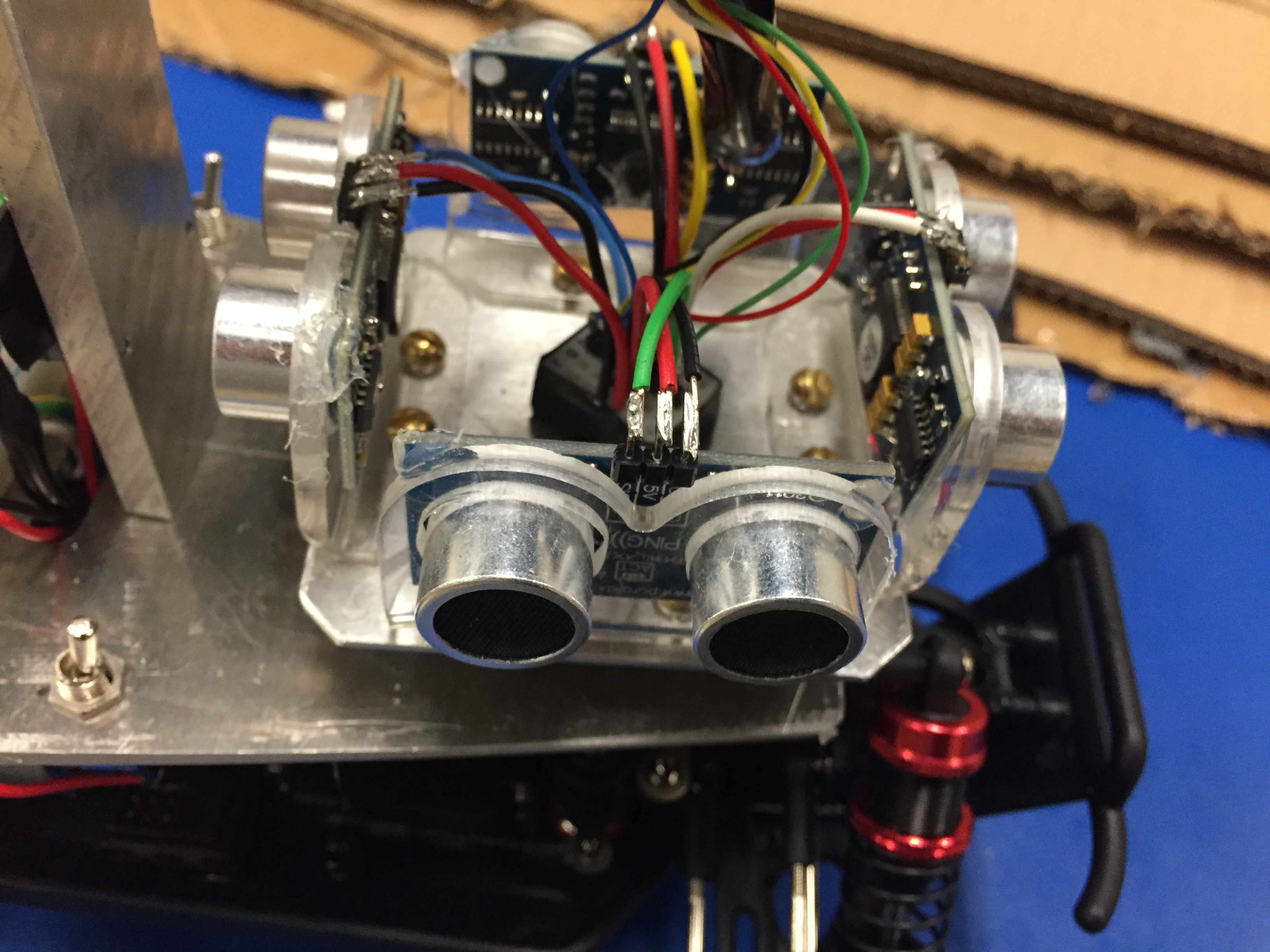
Our modified remote control (RC) car maps out the environment searching for a path, and then attempts to drive around objects. The car has an Arduino Due microprocessor, a speed controller, rotary encoder, four ultrasonic sensors, a stepper motor, a servo motor, and battery packs. The ultrasonic sensors rotate on the stepper motor collecting relative distances around the car at each angle, essentially mapping out the environment. Once the data is collected, the Arduino Due microprocessor analyzes the data looking for edges of walls. The RC car then maneuvers around the wall using our turning method and a rotary encoder to track distance.